



















To reliably assist humans with daily tasks in a broad range of real-world settings, robots should be able to effectively and dexterously manipulate different types of objects. The development of new cost-effective robotic grippers or other hand-like artificial systems plays a key role in enabling dexterous object manipulation in robots.
Researchers at Improbable AI Lab and Massachusetts Institute of Technology (MIT) recently designed a new two-finger robotic gripper designed to tackle everyday manipulation tasks more effectively.
Their proposed robotic system, introduced in a paper on the preprint server arXiv and to be included in the IEEE ICRA 2024 proceedings, can successfully pick up objects with different shapes and textures, subsequently placing them in specified locations.
“We provide the mechanical and dynamical requirements for a robotic finger capable of performing 30 diverse everyday tasks,” Rubén Castro Ornelas, Tomás Cantú, and their colleagues wrote in their paper. “To match these requirements, we present a finger design based on series-elastic actuation that we call the everyday finger. Our focus is to make the fingers as compact as possible while achieving the desired performance.”
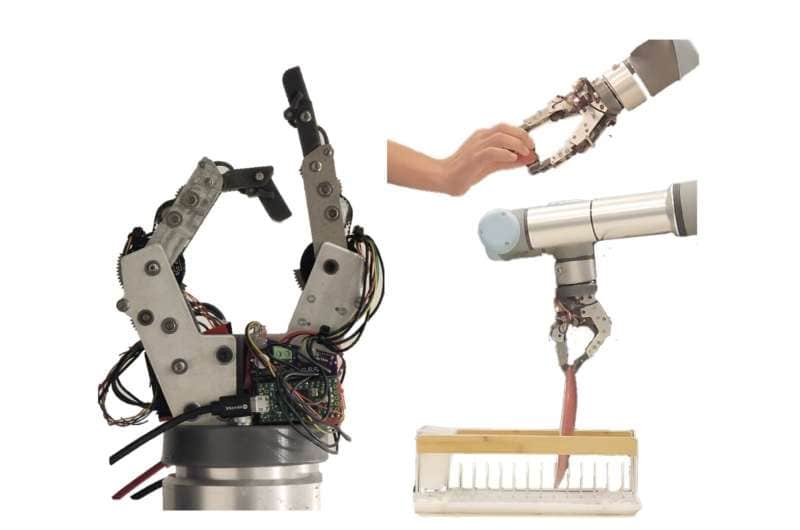
The robotic gripper designed by the researchers is comprised of a structure with two robotic fingers protruding from it. These two fingers resemble human fingers in both size and shape, which allows them to bend and tightly grasp objects.
The team’s human-like fingers were designed to tackle simple everyday tasks, such as picking up objects and placing them in a precisely defined location, as opposed to more complex and advanced manual tasks. While the team initially created a gripper with 2 degrees of freedom (DoF) using only two of their robotic fingers, in the future they hope to create grippers with more fingers.
“Our finger only has 2 DOF,” wrote the researchers. “With a 3rd DOF, the size of the palm would increase. It would be difficult to fit five fingers onto a hand in a future iteration, but a three- and maybe a four-finger hand is still possible. To make a full five-finger hand, we may have to wait for more torque-dense actuators to become available”
To assess the performance of their two-finger gripper, they tested it in a series of real-world experiments. These experiments evaluated the speed and compliance of their system, as well as the force it applied to objects while completing three basic “pick-and-place” tasks.
“We evaluated everyday fingers by constructing a two-finger robotic hand that was tested on various performance parameters and tasks like picking and placing dishes in a rack, picking thin and flat objects like paper and delicate objects such as strawberries,” wrote Ornelas, Cantú and their colleagues.
In real-world experiments, the researchers’ two-finger gripper performed remarkably well, tackling all three of the basic tasks they tested it on successfully. While these are very basic tasks, they reflect activities that humans engage in on a daily basis.
The promising results gathered in initial tests thus highlight the gripper’s promise for the development of basic household robots. In the future, the researchers could further improve their gripper’s design and assess its performance on a broader range of daily tasks.




